

- Ważne parametry maszyn elektrycznych, takie jak moc, moment obrotowy czy prędkość obrotowa, określają ich zdolność do wykonywania pracy i zachowanie pod obciążeniem. Ich poprawne rozumienie jest niezbędne przy doborze i eksploatacji urządzeń.
- W instalacjach prądu przemiennego istotne są trzy rodzaje mocy: czynna, bierna i pozorna, a ich relację opisuje współczynnik mocy cosφ. Niska wartość cosφ oznacza większe straty i dodatkowe obciążenie sieci.
- Parametry rozruchowe, takie jak prąd i moment rozruchowy, mają kluczowe znaczenie dla pracy silnika i wpływają na jego trwałość oraz oddziaływanie na sieć zasilającą. Niewłaściwe warunki rozruchu mogą prowadzić do uszkodzeń.
- Poślizg i prędkość synchroniczna opisują zależność między polem magnetycznym a ruchem wirnika, determinując tryb pracy maszyny (silnikowy, generatorowy lub hamulcowy). To podstawowe pojęcia przy analizie silników indukcyjnych.
- Tabliczka znamionowa zawiera najważniejsze dane techniczne, które pozwalają wyznaczyć m.in. sprawność, prądy czy straty energii. Ich znajomość umożliwia prawidłową eksploatację i diagnostykę maszyn elektrycznych.
Aby w pełni zrozumieć, jak działają maszyny elektryczne, musimy znać podstawowe parametry i wielkości, które je charakteryzują, tego dowiesz się z poniższego artykułu:
- bieg jałowy,
- moc bierna, czynna, pozorna,
- współczynnik mocy,
- moment obrotowy,
- moment rozruchowy,
- przeciążalność,
- prędkość obrotowa,
- prędkość synchroniczna,
- poślizg,
- prąd rozruchowy,
- prąd znamionowy,
- sprawność,
- przekładnia transformatora (przekładnia zwojowa, przekładnia napięciowa).
Jeśli te nazwy są dla ciebie czymś obcym, a twoja praca związana jest z maszynami elektrycznymi warto, abyś zapoznał się z nimi i miał podstawowe pojęcie: „co to jest i po co”.
Bieg jałowy
Bieg jałowy – to stan, w którym maszyna nie jest obciążona, czyli silnik, który nic nie napędza lub transformator, do którego strony wtórnej nie jest podłączone żadne obciążenie.
Transformator nie powinien pracować w stanie jałowym, ponieważ cała pobierana przez niego moc bierna jest zużywana na magnesowanie rdzenia, a moc czynna tracona w uzwojeniu poprzez grzanie się uzwojenia. Straty w uzwojeniu są porównywalnie małe ze stratami, jakie występują przy prądzie znamionowym. Straty w stali stanowią zwykle od 0,15 do 1,5% mocy znamionowej transformatora, co w przypadku transformatorów energetycznych może być sporą wartością.
Współczynnik mocy wynosi wtedy ok. 0,1 - 0,2 co jest bardzo niekorzystne dla sieci.
Tak samo w przypadku silników.
Moc – to zdolność do wykonywania pracy, najczęściej podawana w watach [W] i kilowatach [kW] lub koniach mechanicznych [KM / HP]

Moc podawana w watach [W] to moc czynna [P], co to oznacza: jest to moc pobrana ze źródła i przemieniona na pracę lub ciepło, pojęcie mocy czynnej ma zastosowanie tylko przy prądzie przemiennym i zmiennym, zarówno jednofazowym i trójfazowym. Przy prądzie stałym nie rozróżniamy rodzajów mocy.
Obliczyć ją możemy ze wzoru :
W przypadku silników na tabliczce znamionowej możemy odczytać moc znamionową – na wale, a nie pobieraną z sieci, to trzeba uwzględnić podczas doboru odpowiedniego zabezpieczenia do silnika. Warto także zaznaczyć, że moc nie jest wartością stałą, a zależy od czynników takich jak obciążenie wału, czy prędkość obrotowa.
Szukasz informacji o wzorach, chcesz podyskutować – zerknij na pytanie:
Wzór na moc prądu elektrycznego
Moc bierna, czynna i pozorna
Moc bierna [Q] - podawana w varach [var] to rodzaj mocy, która wykorzystywana jest na wytworzenie pola elektromagnetycznego (cewka) lub zgromadzenie energii w polu elektrycznym (kondensator). Ta moc krąży po sieci i nie jest korzystnym zjawiskiem, powoduje zwiększenie płynącego prądu, a co za tym idzie, zwiększa straty w przesyle energii oraz obciąża dodatkowo sieć. Jednak jest potrzebna do pracy urządzeń takich jak silniki czy transformatory.
Obliczyć ją możemy ze wzoru:
Moc pozorna [S] - podawana w woltoamperach [VA] określa całkowitą moc czynną i bierną. Moc transformatorów podawana jest w VA.
Obliczyć ją można ze wzoru:

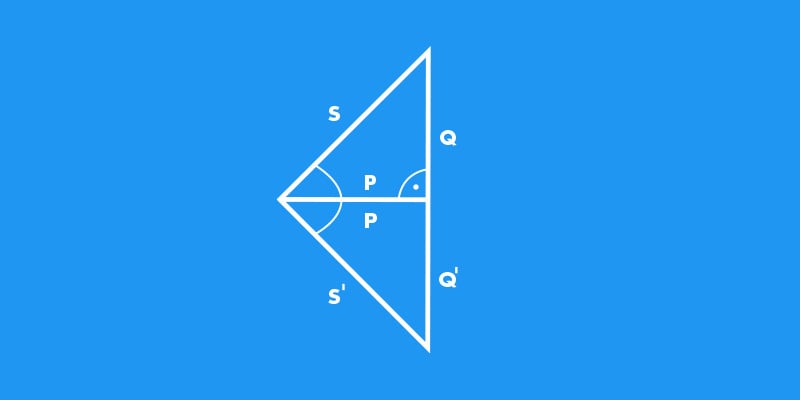
Warto jednak znać tzw. trójkąt mocy oraz zasadę „CIUL”
C-kondensator/ pojemność
L-cewka/ indukcyjność
I-prąd
U- napięcie
CIU(L) pojemność — I przed U tzn. prąd wyprzedza napięcie
(C)IUL- *czytając od końca*- indukcyjność — U przez I tzn. napięcie wyprzedza prąd lub prąd jest opóźniony względem napięcia, dla tego mamy 2 trójkąty w jednym oznaczone na rysunku “ ' ” wartości prim są w przypadku obciążenia pojemnościowego, a wartości bez dla obciążenia indukcyjnego.
Wiedząc, jakie są rodzaje mocy, możemy łatwo zrozumieć, czym jest współczynnik mocy cosφ.
Współczynnik mocy
Współczynnik mocy – oznaczany jako cosφ nie ma jednostki i określa stosunek mocy czynnej do pozornej, lecz nie informuje nas o rodzaju obciążenia indukcyjne czy pojemnościowe.
Dla typowych sieci 1-fazowych do obliczeń przyjmuje się cosφ = 0,9; a dla sieci trójfazowych cosφ = 0,8.
Dlaczego współczynnik mocy jest aż tak ważny? Dla zwykłego użytkownika energii temat jest nieważny, ponieważ nie płaci on za energię bierną, jednak zakłady przemysłowe muszą zamawiać zarówno energię czynną, jak i bierną, a przekroczenie zamówienia może wiązać się z dużymi karami finansowymi, dlatego do poprawy współczynnika mocy stosuje się odpowiednie dławiki oraz baterie kondensatorów.
Bierne zużycie energii
Czy jednak zwykły użytkownik energii powinien zastanowić się, ile energii biernej zużywa ? Oczywiście, mimo że osobiście nie odczuje tego po swojej kieszeni, warto zastanowić się nad tym, chociażby ze względów ochrony środowiska, bo po co w elektrowniach mają palić węgiel, żeby produkować energię, która jest tylko marnowana.
Zestawy aparatury do kompensacji mocy biernej dostępne są w TIM.
Moment obrotowy
Moment obrotowy M – podawany w niutonometrach [Nm] - określa zdolność silnika do wykonywania ruchu obrotowego. W silniku elektrycznym występują dwa rodzaje momentu obrotowego moment elektromagnetyczny i moment użyteczny. Są one do siebie bardzo zbliżone, różnią się od siebie o moment tarcia w łożyskach i moment hamujący powietrza.
Moment użyteczny wyrażony jest wzorem:
Jeśli moment obciążenia jest większy od momentu obrotowego silnika, ten nie będzie w stanie obracać wałem i będzie pracował w stanie zwarcia, co może uszkodzić silnik.
Moment maszyny zależy także od napięcia zasilającego.
Moment rozruchowy
W momencie rozruchu silnik pobiera duży prąd rozruchowy, co jest niepożądane, ponieważ obciąża sieć zasilającą oraz skutki cieplne przepływu takiego prądu mogą uszkodzić uzwojenia silnika. Dlatego na etapie projektowania silnika trzeba wziąć pod uwagę rozruch, większość typowych silników indukcyjnych małych mocy nie posiada, ani klatki rozruchowej, ani konstrukcji głębokożłobkowej, a mimo tego rusza na „sztywno” tzn. poprzez podanie napięcia zasilającego na uzwojenia silnika.
Silniki projektowane są tak, aby w momencie rozruchu moment rozruchowy [Mr], był na tyle duży, aby silnik mógł ruszyć, jednocześnie biorąc pod uwagę prąd rozruchowy i układ połączeń silnika, typowo do rozruchu silnik powinien być połączony w gwiazdę.
Aby silnik mógł ruszyć, musi zostać wytworzony moment dynamiczny, czyli różnica między momentem obrotowym a momentem hamującym.
Moment krytyczny [Mk] to największa wartość momentu, jaki może być wytworzony przez maszynę, występuje przy poślizgu krytycznym, jeśli zostanie on przekroczony, następuje zatrzymanie silnika, a stan taki jest zwarciem. Moment krytyczny występuje w dwóch miejscach na charakterystyce przy ujemnym i dodatnim poślizgu.
Przeciążalność
Przeciążalność [u] – przeciążalnością nazywamy stosunek momentu krytycznego do momentu znamionowego.
Przechodzimy do kolejnego ważnego parametru określającego pracę silnika indukcyjnego – poślizgu. Zanim dojdziemy do tego tajemniczego pojęcia, powiem, czym jest prędkość synchroniczna.
Prędkość synchroniczna
Prędkość synchroniczna [n1] - to prędkość wirowania pola magnetycznego w stojanie maszyny, prędkość to zależy od częstotliwości napięcia zasilającego i liczby par biegunów, określana jest wzorem:
Maszyna wytwarza moment elektromagnetyczny przy wszystkich prędkościach obrotowych z wyjątkiem prędkości synchronicznej.
Kolejną bardzo ważną cechą silników elektrycznych jest samoczynna zdolność przystosowywania się do zmian obciążenia. Przy zmianach obciążenia silnika, zmienia się prędkość wirowania, częstotliwość przecinania pola magnetycznego przez pręty wirnika, zmienia się napięcie indukowane w wirniku, a co za tym idzie prąd płynący w wirniku i moment elektromagnetyczny M. W stanie obciążenia silnika momentem znamionowym wiruje on z prędkością mniejszą od synchronicznej tylko o kilka procent (2-5%) Wiedząc to, możemy poznać pojęcie poślizgu.
Poślizg
Poślizg [S] – to stosunek prędkości wirowania pola magnetycznego do prędkości synchronicznej. Łatwiej obrazuje to wzór na poślizg:
Gdy wirnik jest nieruchomy s= 1
Gdy wirnik obraca się z prędkością synchroniczną, co jest możliwe tylko przy napędzaniu go) s=0
Wynika z tego, że prędkość wirowania jest tym większa, im mniejszy jest poślizg.
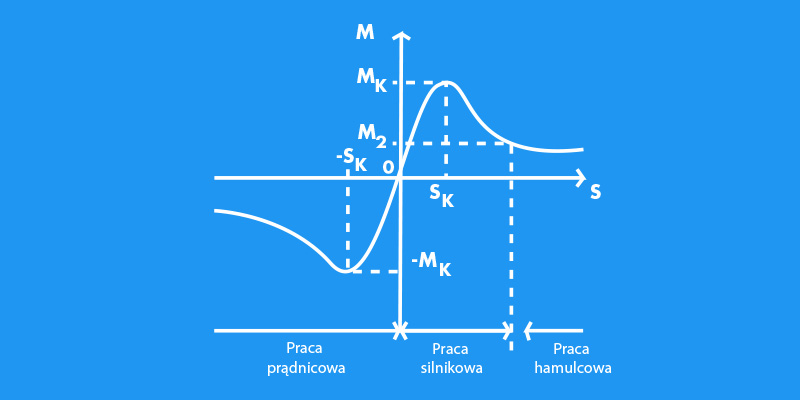
Dla poślizgu s > 1 prędkość jest ujemna n < 0, co oznacza, że wirnik wiruje w kierunku przeciwnym do kierunku pola magnetycznego, a mimo tego wytwarza dodatni moment obrotowy, taki stan jest możliwy tylko, gdy pracujący silnik jest napędzany, taki stan pracy nazywamy pracą hamulcową – wirnik jest hamowany. Więcej o rodzajach hamowania silników możesz przeczytać w tu: link do artykułu o hamowaniu silników.
Dla poślizgu s = 1 prędkość n = 0, co jest stanem rozruchu, w tym punkcie charakterystyki moment ma wartość momentu rozruchowego [Mr].
Dla poślizgu 0 < s < 1 maszyna pracuje jako silnik w normalnym zakresie pracy.
Dla poślizgu s < 0 maszyna ujemny moment elektromagnetyczny a wirnik obraca się z prędkością większą od pola magnetycznego, lecz w tym samym kierunku, taki stan może występować tylko, gdy wirnik jest napędzany inną maszyną (lub np. w skutek opadania ciężaru), w tym stanie silnik oddaje energię do sieci. Ten stan to praca prądnicowa.
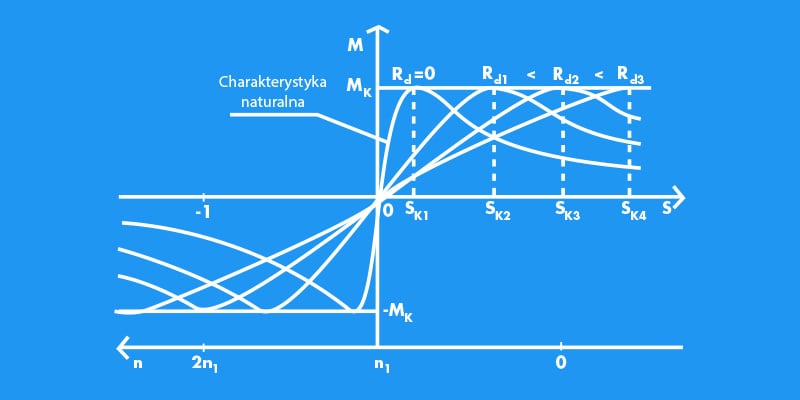
Obniżenie sztywności charakterystyki
W silnikach pierścieniowych, gdzie jest możliwość włączenia w obwód wirnika dodatkowej rezystancji [Rd] można regulować nachylenie charakterystyki momentu. Nazywa się taki zabieg obniżeniem sztywności charakterystyki. Włączenie rezystancji w obwód wirnika powoduje większą zmianę prędkości obrotowej przy zmianach obciążenia silnika niż bez rezystancji w obwodzie wirnika.
Wszystkie podstawowe wielkości znamionowe, które mają istotny wpływ na właściwości silnika, podaje się na tabliczce znamionowe, pozostałe informacje możemy znaleźć w katalogach silników.
Moc znamionowa podawana jest jako moc użyteczna na wale silnika.
Napięcie znamionowe uzwojenia stojana, w przypadku silników 3f jest to napięcie międzyfazowe oraz układ połączeń.
Prąd znamionowy uzwojeń stojana, w przypadku silników 3f jest to prąd przewodowy- płynący w przewodzie łączącym uzwojenie z siecią.
Jakie informacje jeszcze znajdziemy na tabliczce znamionowej?
- Znamionowy współczynnik mocy od strony stojana, czyli sieci,
- Częstotliwość napięcia zasilającego stojan,
- Prędkość obrotową znamionową wirnika,
- Sprawność.
Na podstawie tych informacji, możemy wyznaczyć między innymi:
- moc czynną pobieraną z sieci,
- liczbę par biegunów,
- poślizg znamionowy,
- straty mocy czynnej w uzwojeniu wirnika.
W przypadku silników pierścieniowych:
- przekładnię napięciową i prądową.
Przekładnia zwojowa i napięciowa
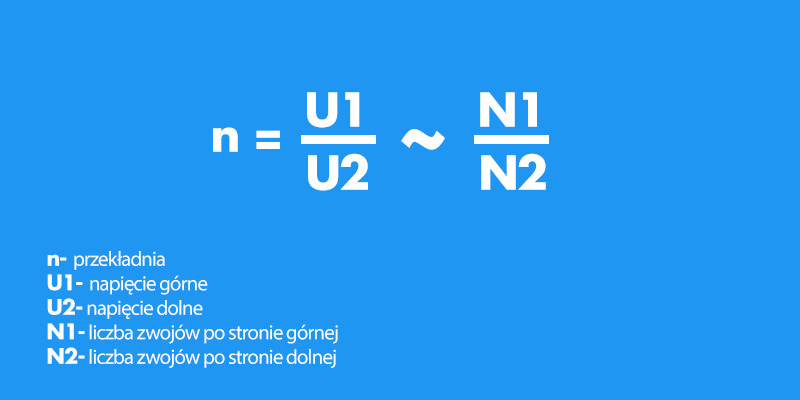
Przekładnia zwojowa i napięciowa transformatora – przekładnia zwojowa to stosunek ilości zwojów uzwojenia górnego do ilości zwojów uzwojenia dolnego. Uzwojenie górne to te, po którego stronie jest wyższe napięcie, dolne to te, po którego stronie napięcie jest niższe.
W przypadku transformatorów separacyjnych, których przekładnia wynosi 1, nie rozróżniamy stron górnej i dolnej.
Przekładnia napięciowa jest stosunkiem napięcia górnego ľ wyższego do dolnego – niższego.
Przekładnie zwojowa i napięciowa są sobie praktycznie równe.
Komentarze (0)